UPDATE - Feb/07
A new JMI crayford focuser, a new way of mounting the motor,
a new program, a piggyback project box, and a tiny new WIRELESS focus controller with a 500m
range. This means I can clip the focuser controller to my belt loop and stop tripping over the
extra wire! New features (much more expandable due to a different PIC):
- 8 presets
- 4 speeds (fast, med, slow, single step)
- programmable speed reference for different gear ratios
- simple friction clutch mechanism for quick disengaging (manual control)
- aux control function for 2 servos or 2 digital (on/off) control outputs
- includes ASTROSNAP autofocus input mode
Click *HERE* for the updated version!
or scroll down to continue with the old version |
 click image to enlarge
click image to enlarge |
PICfocus (revised) - version 4.09
Right-click here, and "save target
link as" to download a short video of PICfocus in action (627k file)
Version 4.09 changes:
- you must now hold the MODE button in for 10 seconds to
change to the next mode (to avoid inadvertent mode changes during single stepping)
- the fast speed has been reduced to 50 steps per second to reduce "slipping"
Version 4.08 changes:
- an important update from version 4.07; a critical bug that rendered
the focuser "dead" upon arrival at the limit switch (which it does at powerup) has been fixed
- increased the number of available presets from 5 to 10
Homemade Electronic Focuser
One of the LXD-55 SN's drawbacks is the stock focuser, with which fine focusing is very difficult. I bought a
helical fine focuser to try to solve this problem
and although it would probably be fine for visual observing, it didn't cut the mustard for imaging for
a couple of reasons:
- The helical focuser has "play" in it
- The camera/eyepiece ROTATES as you adjust it, throwing off your orientation
- Any time you touch the scope, you introduce some vibration and have to wait for it to stop before analyzing
the result
- It's difficult to view the image on the computer screen at the same time as you perform the fine focusing
AT the scope
I contacted Mike Gray
(a fellow LXD-55 SN owner), after deciding to build an electronic focuser similar to the one he posted on his
website. I wanted a "stand alone" focuser that could also be controlled
from the computer if desired, with a couple of added new twists (onboard
storable presets and intelligent local control
via a PIC microcontroller). I proceeded to write the
PIC code using PICBASIC PRO
from MELABS, and chose the "standard" PIC 16F84A
microcontroller with 1024 bytes of program code space as the brains of the unit. I used the
EPIC
programmer (again from MELABS) to physically program the PIC. I've made the PIC hex code available here so that
all you need is a PIC programmer (or a friend with one) to get one of these suckers programmed for your own
PICfocus. If you don't know anyone with a PIC programmer, email me if you'd like a quote on sending you a
preprogrammed PIC in the mail.
|
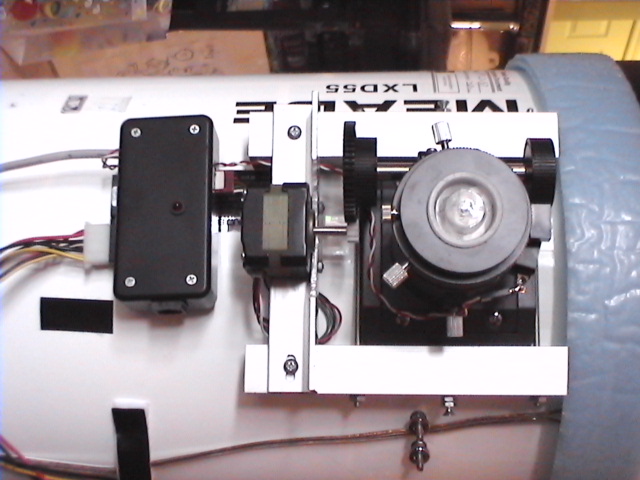
The PICfocus features include:
- non-invasive mounting technique
- focuser travel resolution of 0.0018" per step (measured with 5:1 gear ratio)
- unlike a worm gear design, the hardware maintains the ability to focus manually with the focuser knob when PICfocus is
powered down without having to release any type of latching mechanism (although once you try PICfocus you'll probably
never want to focus manually again!)
- a 4-switch hand controller for local control
- single step, slow step (10sps), and fast step (100sps) control
- 10 storable/recallable presets in non-volatile memory
- single step (normal), half step (2x resolution), and dual coil (high torque) modes
- PC controllable (program pending) via a legacy parallel port (uses
the control status byte port, not the standard data byte port, soas not
to conflict with LX webcams)
- compatible with the Bonduelle interface in Astrosnap for AUTOFOCUS control
- 3 "accessory" outputs that can be configured for PC control of other accessories (example: x/y axis motor
control for positioning a guidescope)
- 2 of these 3 accessory outputs can be used to directly control RC servos (which may be modified for continuous rotation)
|
|
Notes: After construction and implementation, I noted a small amount of "play" or backlash
(there's that old Meade term) in the gears; there was a very slight difference in positioning depending on
which direction the final position was approached from (not an issue for visual observing but more
important for imaging). This was reduced to 1 step of the motor by ensuring the gear mesh was as close as
possible.
|